24小时服务热线:


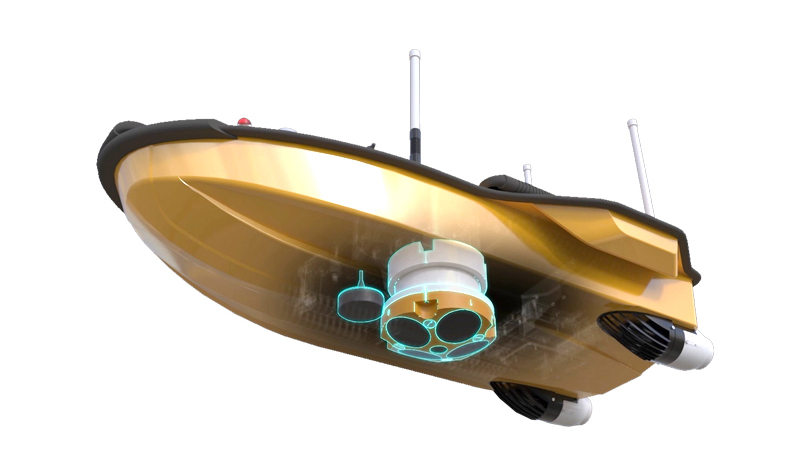
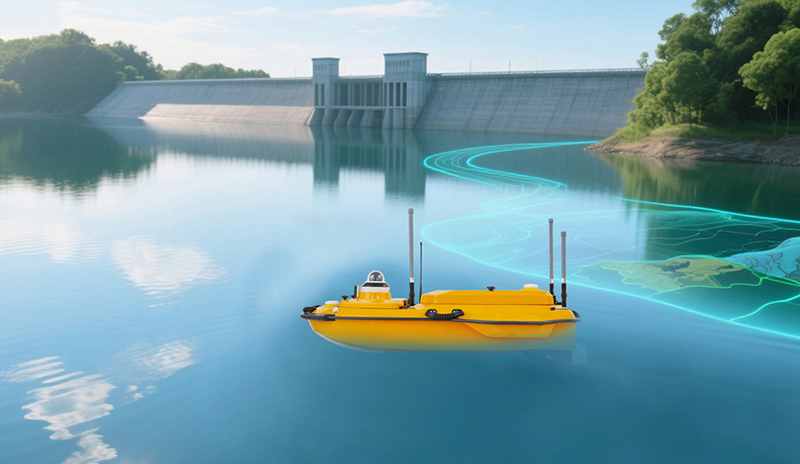
M69-DH4无人船配备北斗高精度全球定位系统和自动控制技术、内置4G/5G通信模块、高分辨率摄像头,可选搭载测深仪、走航式ADCP、侧扫声呐、水质传感器等先进设备。使得无人船能够在无... ...




| 船体参数 | |
| 船型 | 三体船 |
| 主尺寸 | 长×宽×深:1200×750×400mm |
| 总高 | 约 0.9 米 |
| 工作水深范围 | 85~100mm |
| 材质与结构 | 碳纤维/凯夫拉布;安装橡胶护舷 |
| 浮性 | 排水量 30kg; |
| 抗风浪等级 | 抗风浪等级 2 级海况(或者 3 级风) |
| 抗沉性 | 具有破舱稳性,双层船壳体防沉没 |
| 快速性 | 采用 2 台水下全浸没推进器;主机功率不低于 400W; |
| 操纵性 | 双桨差动推进器,能够实现无人船灵活控制 |
| 防护等级 | 整船防水等级 IP67 |
| 续航 | 6h@2m/s;可定制 |
| 无人船船控系统参数 | |
|
能源 |
锂电池电压不低于 24V,容量不低于 35AH,保证无人船续航要求;电池内置 BMS,使用 CAN/RS485 通信,能够反馈电池电压、SOC 等信息;电池寿命不低于 500 循环次 |
| 具有配电盒,提供 DC24V 稳压供电系统,额定功率不低于 240W,具有分电配电模块,不低于 7 路配电,每一路具有车规级过载保险;同时提供 DC12V 稳压供电系统,额定功率不低于 240W,具有分电配电模块,不低于 7 路配电,每一路具有车规级过载保险;稳压供电具有可控开关,能够实现系统启动层级顺序要求 | |
| 一键启停开关;同时配有具有满电、过充、短路保护等功能的充电器,功率约于 200W | |
|
动力 |
无刷涵道推进器,功率不低于 400w,转速不高于 10000rpm,供电范围18~25.2V |
| 无人船配有 50A 水冷,防水无刷电驱,使用 PWM 驱动 | |
|
船体 |
国产化、纯自研自主可控的船体ECU 控制器,能够实现 L2 等级自动驾驶(包括:ACC、LCC、CCS 模式) |
| 具备工业扩展能力、远程工业控制能力,控制能力不低于:3 路 RS232 串口;2 路485 串口;1 路 CAN 接口;8 路 PWM 信号输出;12 路 0~12V 模拟量采集;12 路开关量采集;开发好系统,并提供接入、显示接口 | |
| 舱内具有关键舱室的进水检测、温度检测、姿态异常检测、电子舱检测系统及散热模组等 | |
| 无人船安装工作灯光组系统,能够显示船处于不同的控制状态 | |
|
通信 |
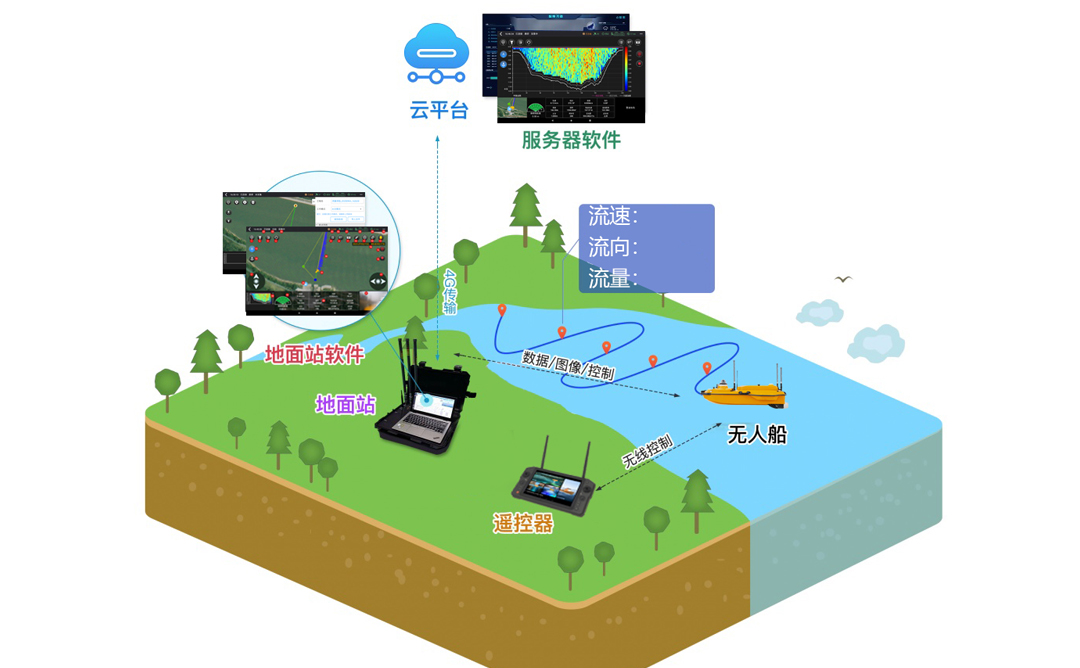
标配图数一体 MESH 通信电台;水面通视通信距离2km,能够传输 1080P 视频、监控等;支持多设备组网 |
| 标配 4G 网络通信模块;内置路由器,能够链接公网(通讯距离无限) | |
|
导航定位模块 |
搭载北斗双天线及组合导航模块 (1)定位系统:北斗双天线定向定位;定位半径精度优于 0.8 米;(2)速度精度≤0.05m/s,朝向精度:≤0.15°,更新速率 5Hz;具有设备故障码识别系统;(3)组合导航能实现伪距精度 0.1 米,使用 RTK 后相对精度 0.01 米;(4)倾角范围:≤±90°,准确度:≤±0.5°(5)支持遮蔽区域丢失北斗信号后,8 秒内提供精度不低于 1米的组合导航定位结果 |
|
软件 |
能够上报船端各个传感器数据、运行状态数据、故障码数据、通导信息数据、算法数据等 |
| 能够按照上位机下发的设定航线自主巡航,与设计航迹的横距误差的均方差小于0.16m²,航向角误差 1~2°;同时支持一键返航(2 种返航模式)、定点悬停等 | |
| 具有定速、定向、定速定向航行控制接口,能够被其他系统调用; | |
| 支持航迹跟踪功能,能够实现自主航行,系统同时具有航速、位置、航迹控制能力; | |
| 支持手动模式、程控模式、全自主控制三种模态的功能 | |
| 运行环境支持 Windows、麒麟系统、/Android | |
| 驾驶辅助系统参数 | |
|
边缘计算机 |
算力不少于 20TOPS;能够实现端到端无人船的运动控制(需要安装高阶感知传感器)。 |
|
感知 |
标配搭载毫米波雷达,探测距离不少于 40 米,IP67 等级防水,探测角度 112°;能够实现无人船的紧急避障,包括:停船、绕行等。 |
| 标配搭载海康 2MP 双轴云台摄像头,防水等级 IP65,能够实现水面目标识别,并进行主动跟踪目标。 | |
| 遥控参数 | |
| 通讯方式 | 实时射频点对点传输 |
| 作用距离 | 2km |
| 屏幕尺寸 | 7寸高清显示屏 |
| 防水等级 | IP67 |
|
功能 |
实时切换工作模式、控制船速、转向等功能实时显示视频、水深、定位以及船控数据 |
| 安全参数 | |
| 避障 | 视频观察、自动避障 |
| 视频 | 高清视频 |
| 自动返航 | 低电量或失联自动返航 |
Copyright © 2020-2026 厦门辰迈智慧科技有限公司 版权所有 备案号:闽ICP备20007089号